
前回までで、ひとまず本体は作り終わったので、今回は制御マイコンなどの電子機器系を組み付けたいと思います^_^
制御マイコンは、最初はraspberrypi などで、プログラムも含め完全自作をしようかと思ったのですが、定番のarduino とRAMPSを使ったものが意外と安く、自分でプログラムを組む労力を考えると安上がりかなと思いましたので、定番の構成にしました。制御する計算式などは考えたので、個人的には全部1から組んでみたかったんですけどね(^^;)
※参考:raspberrypi

さて、本題に入ります。今回の完成図がこちら↓(仮置きなのでごちゃごちゃですが…)

制御系に必要な材料
◯基板類
・arduino MEGA 2560 R3 1個
・RAMPS1.4コントローラ 1個
・モータードライバーA4988 5個
・LCD(液晶)モジュール12864 1個(接続ケーブル含む)
これらがセットになっているものOSOYOO製のものを購入しましたが、今の所問題ありません^_^
※2018/08現在ではOSOYOO製のものの販売はありませんでした。以下のものが同等と思われます↓
※2018/08現在ではOSOYOO製のものの販売はありませんでした。以下のものが同等と思われます↓
3DプリンターキットRAMPS1.4 + for Mega 2560 CH340 +12864コントローラー+ A4988チップボードパーツはReprapに適合
TANKE
◯コネクタ類
・ヒロセコネクタ 4P 4個
・ヒロセコネクタ 2P 3個
・ヒロセコネクタ端子 22個
※↑のコネクタはうちにあったものを使っただけなので、こちらのようなコネクタ↓の方が綺麗にできると思います。

◯エンドストップ
・マイクロスイッチ 3個
・リード線 70cmぐらい 6本
制御系の組み付けに必要な工具
・ワイヤーストリッパー
・圧着工具
・マイナスドライバー
・はんだごて
・ハンダ
・グルーガン
・結束バンド
制御系の組み付け方
1.エンドストップ作成
エンドストップとは、各柱のキャリッジが最大まで上がった位置を検知するためのスイッチです。基本的に造形の最初に3つの柱すべてについて、スイッチが押されるまでキャリッジが上昇させます。そこから設定した距離(今回の私の3Dプリンターの場合は、176.5mmです)だけ、下げることで造形が始まります。この距離が造形できる最大の高さになります。
さて、作り方ですが、マイクロスイッチの両端子(スイッチが押されると通電する端子)にリード線を半田付けし、リード線のもう一方の端にヒロセコネクタをつけます。ヒロセコネクタは圧着端子を圧着し、コネクタに刺すタイプです。ヒロセコネクタ出ない場合は、RAMPS基板がジャンパーピンなので、メスのコネクタをつけます。それを3組作ります。半田付けしたところが何かに当たってショートしないように、グルーガンで保護しています。マイクロスイッチはうちに転がっていたものを集めたので、大きさがバラバラです(^^;)

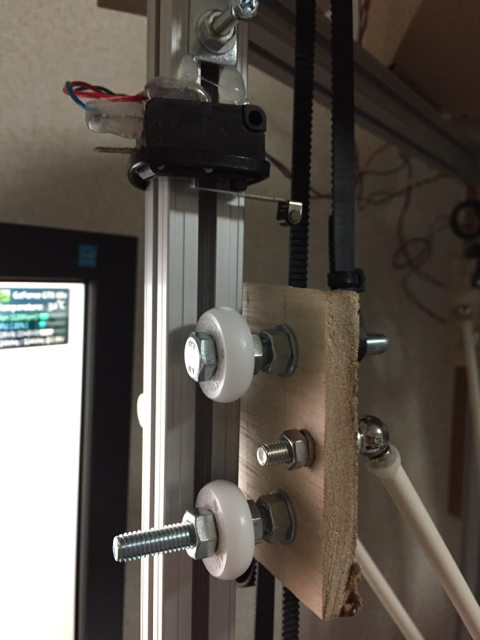
2.エンドストップ固定
作ったエンドストップをグルーガンで柱に固定します。結束バンドで閉めた後、キャリッジが当たった時に上にズレないように、グルーガンで上の部分を接着していますが、今はまだグルーガンでは固定せずに、次回説明するソフトウェアを使って正確な高さを決めてから接着します。
3.モーターの配線
次にステッピングモーターの配線の先にヒロセコネクタを付けます。こちらもエンドストップと同じようにメスのコネクタ(4P)を付けます。今回使用したステッピングモーターKA50-HM1-552はバイポーラ型といって、2つのコイルの両端に電圧をかけ、その極性のパターンで回転させます。そのため、配線は4本で、1つ目のコイルの両端を1A、1Bと表し、2つ目のコイルの両端を2A、2Bと表します。
↓の写真で言うと、黄=1A、青=1B、赤=2A、ベージュ=2Bとなっています。

4.arduino,RAMPS基板への接続
ついに最後の仕上げです!各電子機器を基板につけていきます。この手順はOSOYOOのセットを買ったら説明書がついてくるので、その通りにやれば問題ありませんでした。英語ですが、ほとんどイラストで分かるかと思います。念のため、こちらでも説明していきたいと思います。
接続完了の図がこちら↓わかりにくくてすみません(^^;)

まず、arduinoとRAMPS基板を接続します。これはジャンパーピンとソケットが入るようにしか入らないので迷うことはないと思います。
次に、LCDモジュールとケーブルをRAMPS基板に接続します。これは、ケーブルが2本あってどっちがどっちかわからないかもしれませんが、基板に1と2が書いてあるのでわかると思います。
さて、ここからが本番です。まず、モータードライバーを接続します。モータードライバーを挿す部分が5ヶ所ありますが、今回は4ヶ所接続します。なぜ1つ使わないかというと、5個の内訳が、3つのモーターと2つのエクストルーダであり、今回作っている3Dプリンターはエクストルーダが1つだからです。
また、モータードライバーには向きがあるので注意してください!逆に挿すとモータードライバーが壊れる可能性が高いです。向きは、上の写真の向きに基板を見た時(LCDモジュールのコネクタが左)に、ヒートシンクの左側に電流調整用の可変抵抗(プラスドライバーで回すやつ)がくるようにします。
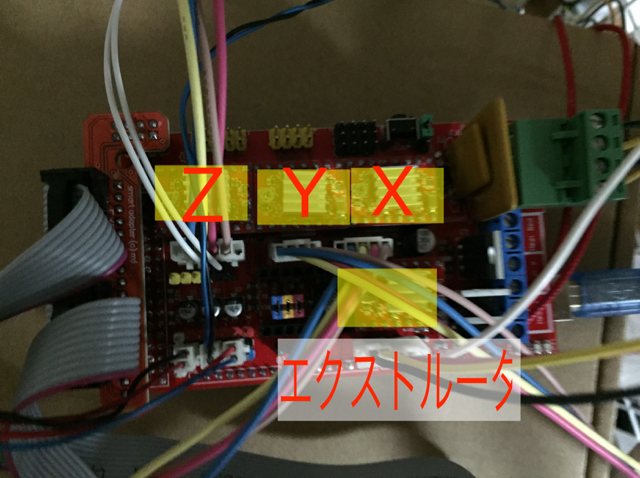
4つの配置ですが、↓のような配置になります。黄色のあみかけが、モータードライバーです。
上の3つが、各柱(X、Y、Zと呼びます)で、下の1つがエクストルーダです。
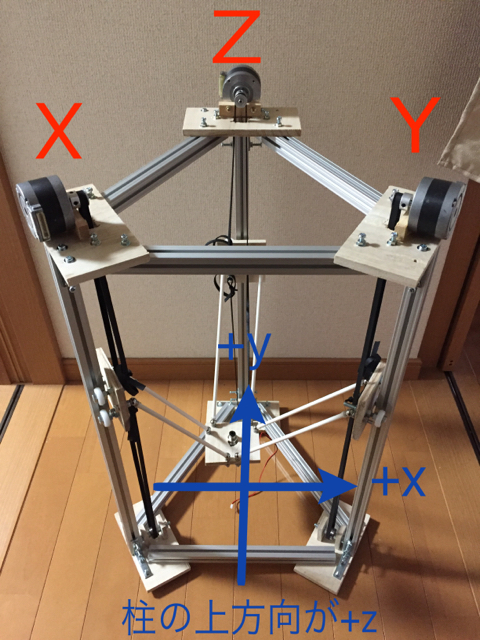
ここで、柱の配置ですが、↓のようになります。3次元空間のx、y、zと混同しそうですが、RAMPS基板がデルタ型ではない型にも対応しているため(と言うか逆に基本メンデル型のような各軸ごとに動かす型が基本でデルタ型にも対応しているといった方がいい?)、ステッピングモーターのラベルとしてX、Y、Zを使っています。
デルタ型の場合は、↓の写真のように、3次元空間は底面の三角形をx-y平面とし、柱Xから柱Yに行く方向がxの正の方向で、これに直交して柱Zに行く方向がyの正の方向、柱に平行にステッピングモーター側に上に行く方向がzの正の方向になります。
モーターの位置がわかったところで、モーターをRAMPS基板に接続していきます。
↓の写真のモータードライバーの下に位置する黄色のあみかけがコネクタで、コネクタの端子は写真の向きに基板を見た時に、左から1B、1A、2A、2Bとなります。
先ほどのステッピングモーターの配線の色を見て、間違えないように接続します。

そして、エンドストップも接続していきます。下の写真の黄色のあみかけがコネクタの位置で、ジャンパーピンが2×6で並んでいます。これは3つのモーターの最小と最大のエンドストップに対応しています。デルタ型では、最小のエンドストップは使わないので、最大の方だけエンドストップのコネクタを接続していきます。したがって、一個おきにコネクタを接続することになります。

そして、最後に12V電源と、ホットエンドのサーミスタ(温度を測るための素子)とヒーターを接続していきます↓

私が買ったホットエンドは、サーミスタの配線にすでにコネクタが付いていたので、そのまま挿すだけでした。ここもホットエンド2つとヒートベッド1つのために3ヶ所(1つが2ピンなので、6本のジャンパーピン)ありますが、写真の向きで見て一番右の2ピンに挿します。
ヒーターは、配線の被覆を引っ張って外し、写真右下の青いターミナルブロックにマイナスドライバーで配線を固定します。ここも3ヶ所(ヒーター×2、ヒートベッドで、プラスマイナスあるので6ヶ所)ありますが、写真下側の2本に接続します。
ヒーターは極性がないので、どっちをプラスにしても大丈夫です。ちなみに、私が買ったホットエンド付属のヒーターは約4Ωだったので、12Vで3A流れ、36Wになる計算です。3Dプリンターとしては標準的ですかね?
最後に、12V電源を写真右上の緑のターミナルブロックに接続します。写真の上から-,+,-+の順になりますので、絶対に間違えないようにしてください!ここで、なんで2ヶ所あるんだ?と思われる方もいらっしゃるかと思います。説明書にある回路図をよく見るとわかりますが、若干ヒーターなどの電源系統が分かれています。ですが、私の場合はPCのATX電源を使っているため、この区別をすることなく接続しています。注意点としては、どちらも十分に太い配線を使うようにする、ということです。
私が使っているATX電源はこちら↓です。500Wの中ではかなり安い方だと思います。今の所全く問題ありません。

さて、これまで長くなりましたが、これでようやく3Dプリンターのハード部分は完成しました!^_^
次回でソフトウェアを設定して動かしていきたいと思います!
今回はかなり長くなりましたが、最後までありがとうございました(^O^)/
